Computational Methods Robotics
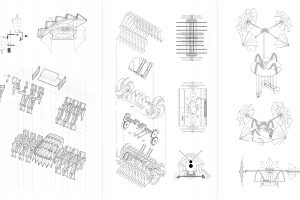
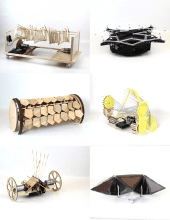
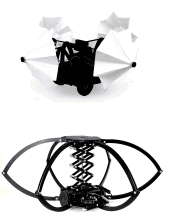
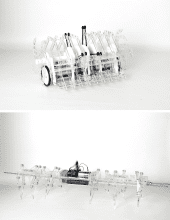
Like the language of machines that inspired Le Cobusier a century ago, these projects creatively explore how the language of robotics could inspire a new generation of architects spatially and formally, encouraging future architects to imagine smart environments, with the intelligence and behavior of animate buildings. Working in groups, students developed a robot based on a natural system exemplifying various approaches for how to define and implement the distinction between natural and artificial systems as a driver for computational design. During the final exam debut performance, each project was introduced by an announcer as each uniquely designed, fabricated, and programmed robot strutted their computational prowess while walking, rolling, even dancing down the salon length catwalk in their morning debut. The project requirements included a bluetooth controlled robot, which exhibits the two primary attributes of a robot: the ability to be reprogramed and a complex range of motion. Thus each robot had to have the ability to move forward and backward and be able to turn. Additionally, it had to have a physical transformation related to the study of a natural system. Students integrated the specific contextual parameters for material processing and performative parameters to develop computational processes for transformation. During the final exam debut performance, each project was introduced by an announcer who read the project description as the robot moved down the runaway that spans half the length of the Storrs Salon. This performance showcased the range of motion and design attributes of each robot.